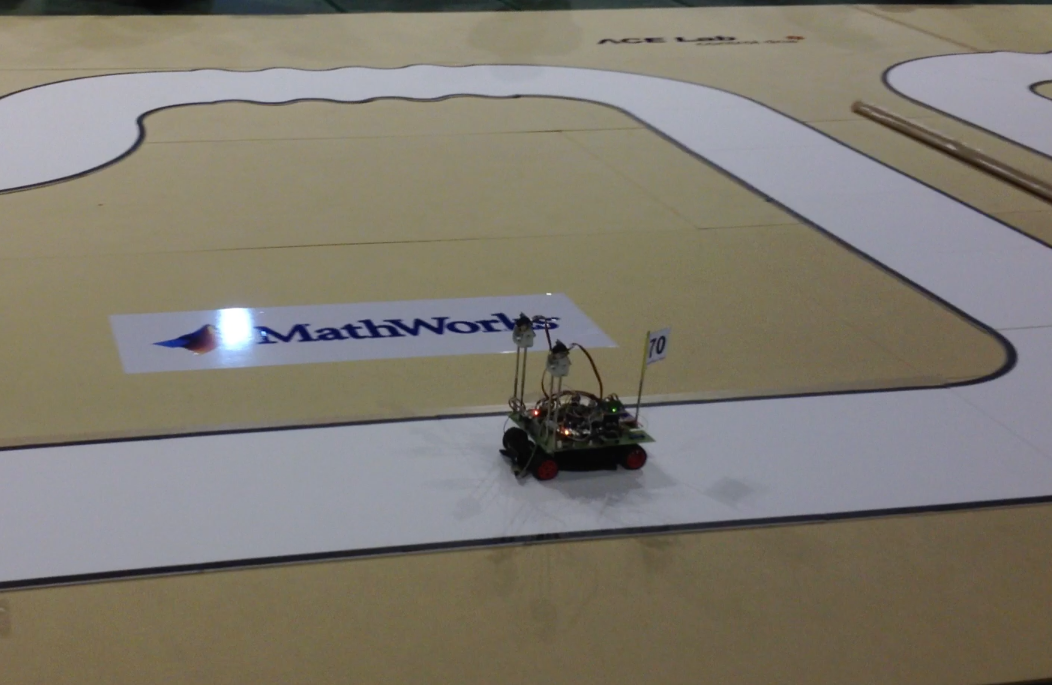
이 작품은 한양대 2014 지능형 모형차 대회 출품작으로, 본선에 나가서 공동 3위를 차지한 작품입니다.

년도: 2014
목적: 한양대 지능형 모형차 경진대회
관련 링크
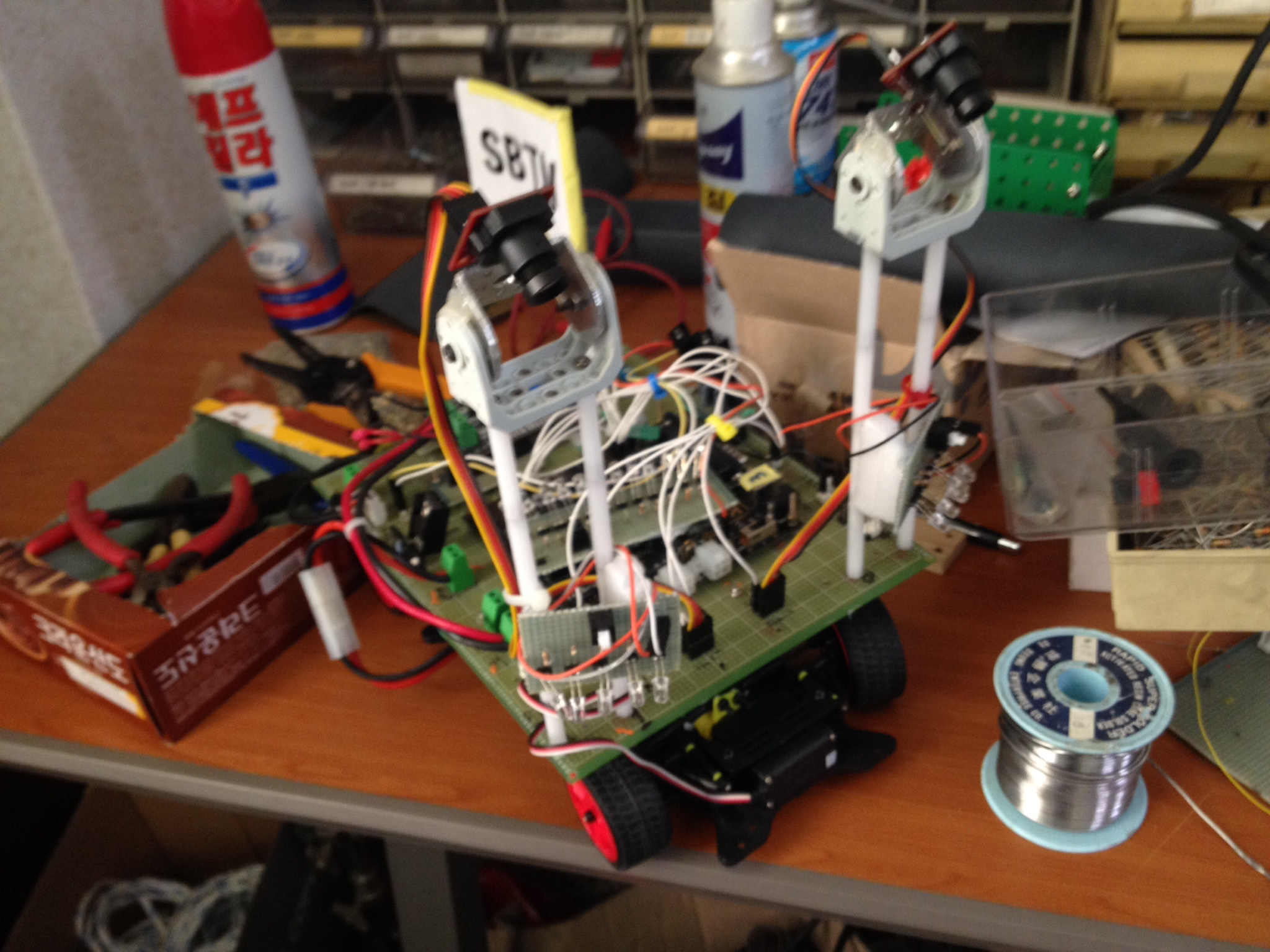
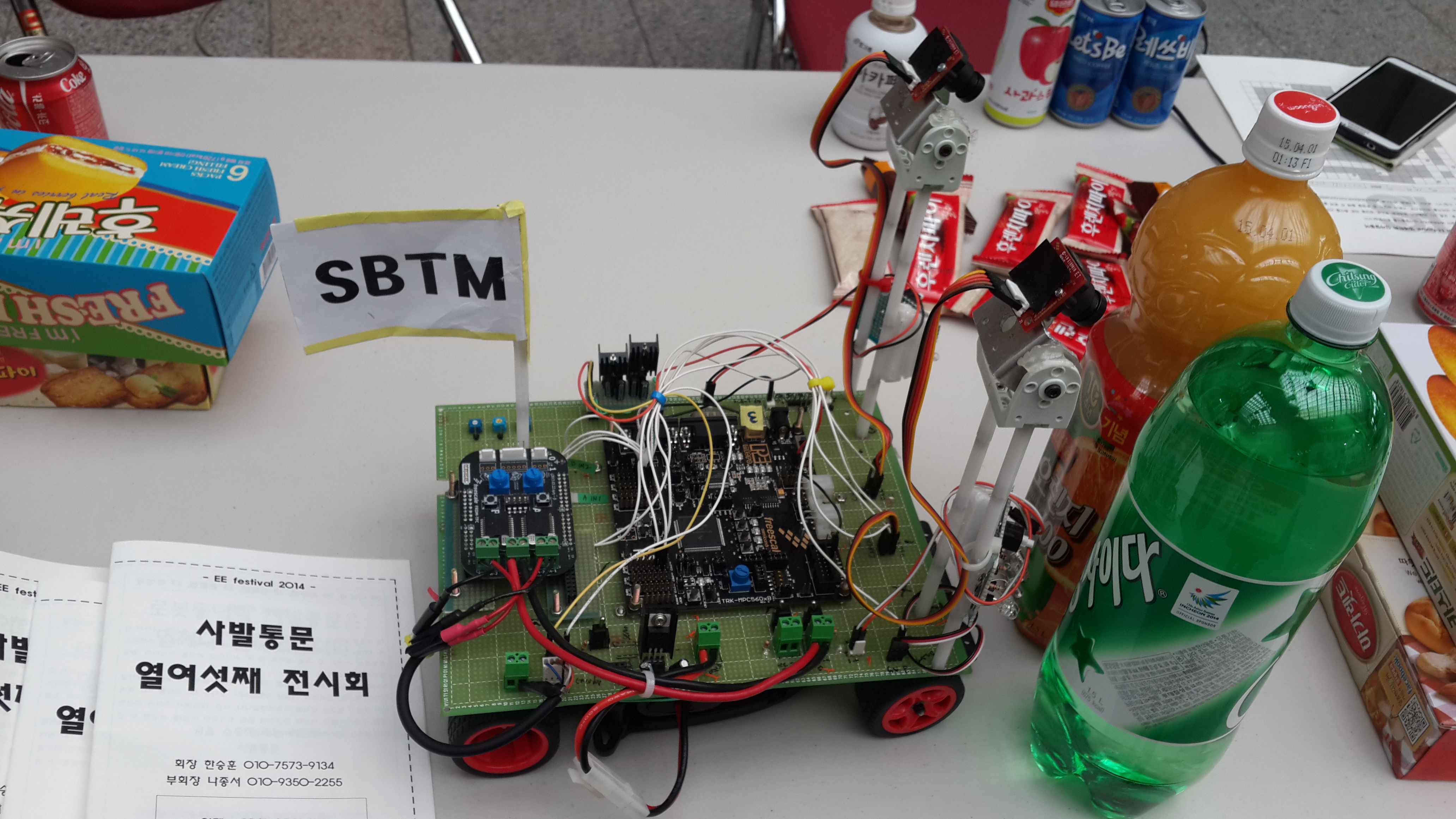
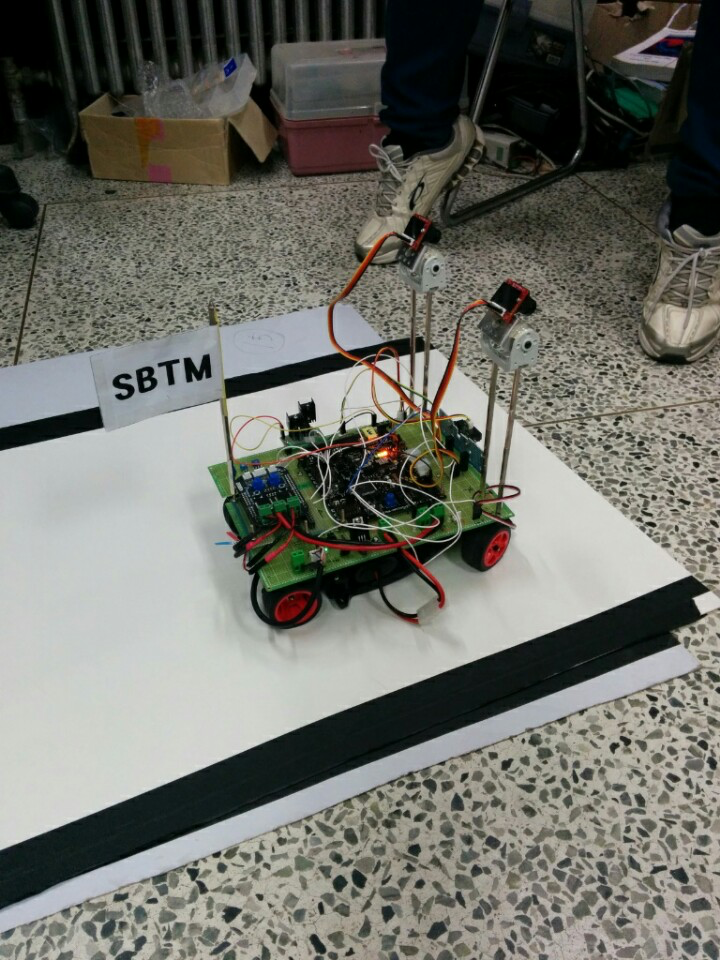
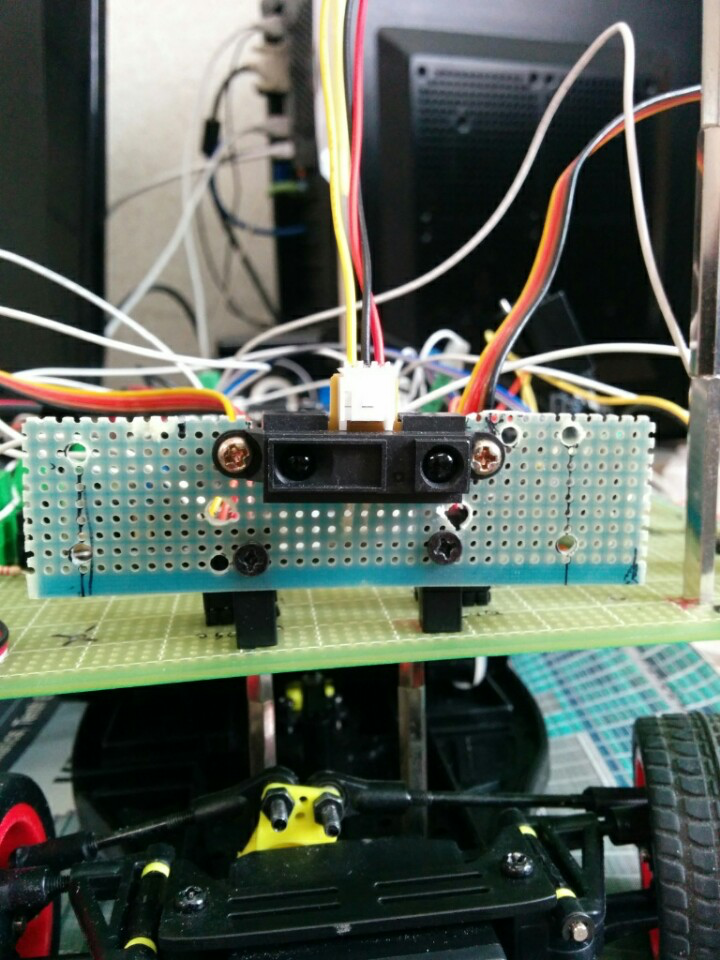
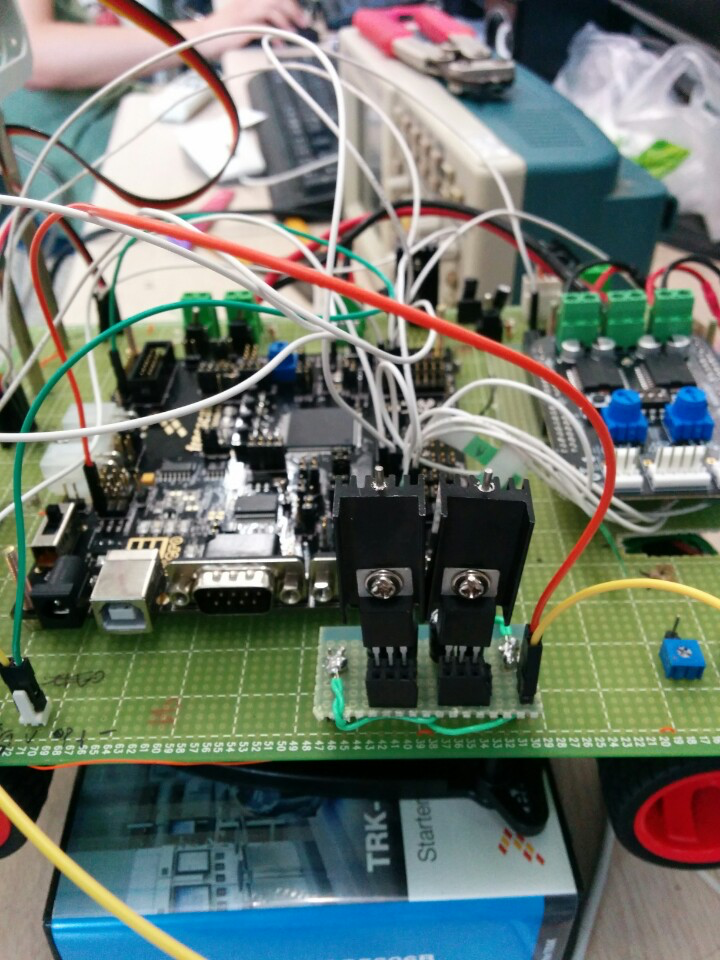
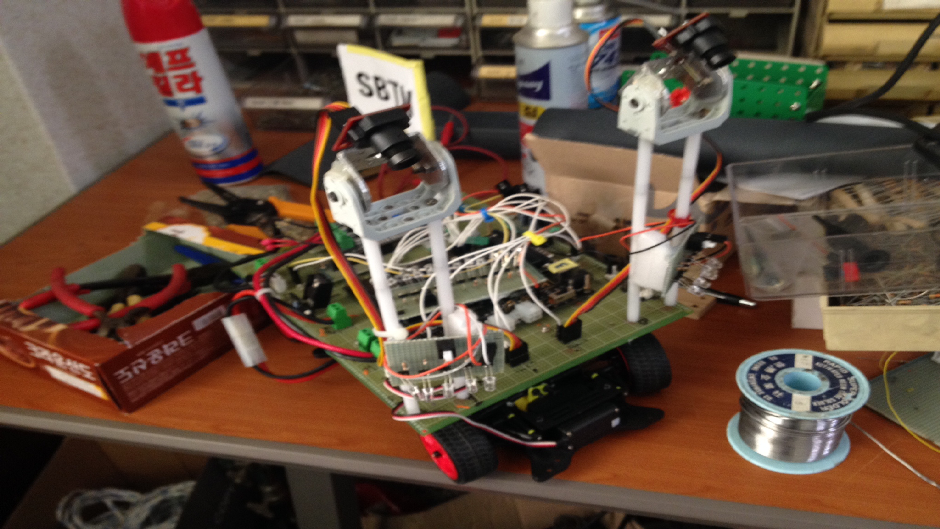
기본적으로 라인트레이서 기능을 수행하는 로봇으로, 카메라 두 개를 통하여 양 쪽 사이드의 라인을 인식하여 길을 찾아가는 방식입니다.
차체에 달려있는 카메라 두 개를 이용하여 영상을 분석하여 길의 경계선을 인식한 후, 라인트레이서 기능을 수행합니다. 모터는 DC 모터를 PID 제어하여 우리가 원하는 동작을 구현하였습니다. 또한, 대회에서 주어진 미션들(멈춤 구간이라던지, 어린이 안전구역 등의 추가적인 미션)을 수행할 수 있는 자체적인 알고리즘을 탑재하였습니다.



{kind=link}
{kind=link}
{kind=link}